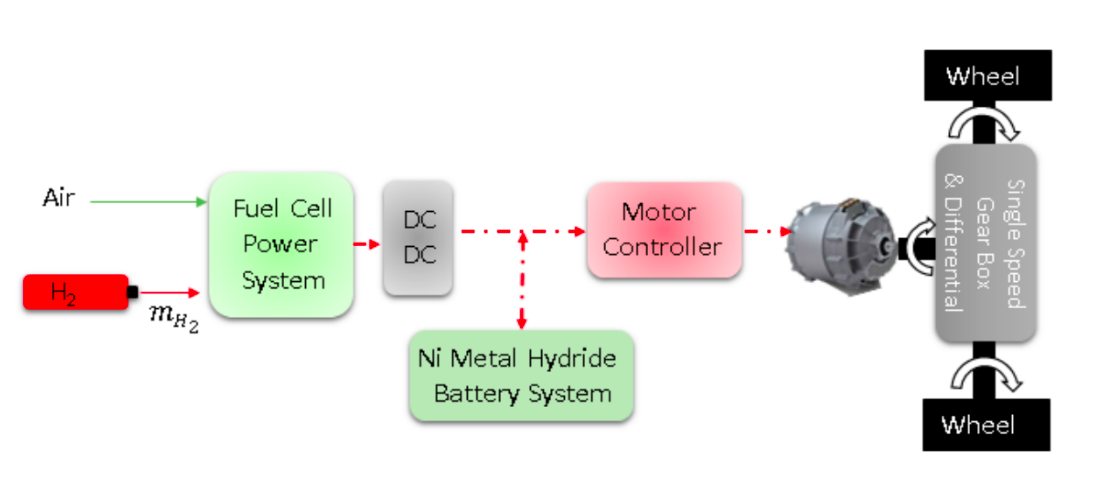
Bebop Navigation collision cone based optimization for dynamic obstacles learning MPC controller Using deep network to learn control for tracking RL based navigation bachelor thesis at IIT Roorkee Formula Electric Car IITR Motorsports Hydrogen Fuel Cell Vehicle modelling, simulation and control of subsystems