PIVO: Probabilistic Inverse Velocity Obstacle for Navigation under Uncertainty
PS Naga Jyotish,
Yash Goel,
AVS Sai Bhargav Kumar,
and K Madhava Krishna
28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) 2019
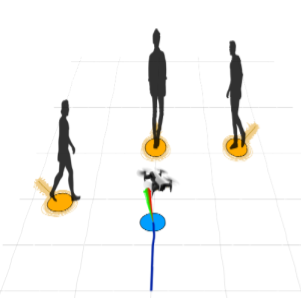
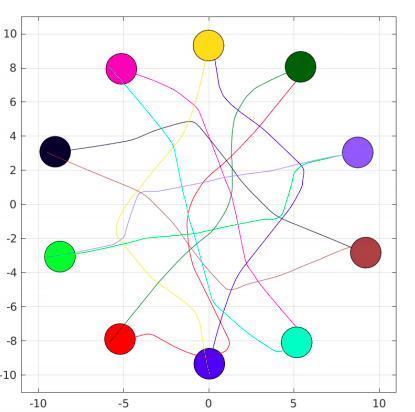
In this paper, we present an algorithmic framework which computes the collision-free velocities for the robot in a human shared dynamic and uncertain environment. We extend the concept of Inverse Velocity Obstacle (IVO) to a probabilistic variant to handle the state estimation and motion uncertainties that arise due to the other participants of the environment. These uncertainties are modeled as non-parametric probability distributions. In our PIVO: Probabilistic Inverse Velocity Obstacle, we propose the collision-free navigation as an optimization problem by reformulating the velocity conditions of IVO as chance constraints that takes the uncertainty into account. The space of collision-free velocities that result from the presented optimization scheme are associated to a confidence measure as a specified probability. We demonstrate the efficacy of our PIVO through numerical simulations and demonstrating its ability to generate safe trajectories under highly uncertain environments.